



















Navigation Sensors · 341
Double Gyro interface for DNV NAUT-AW
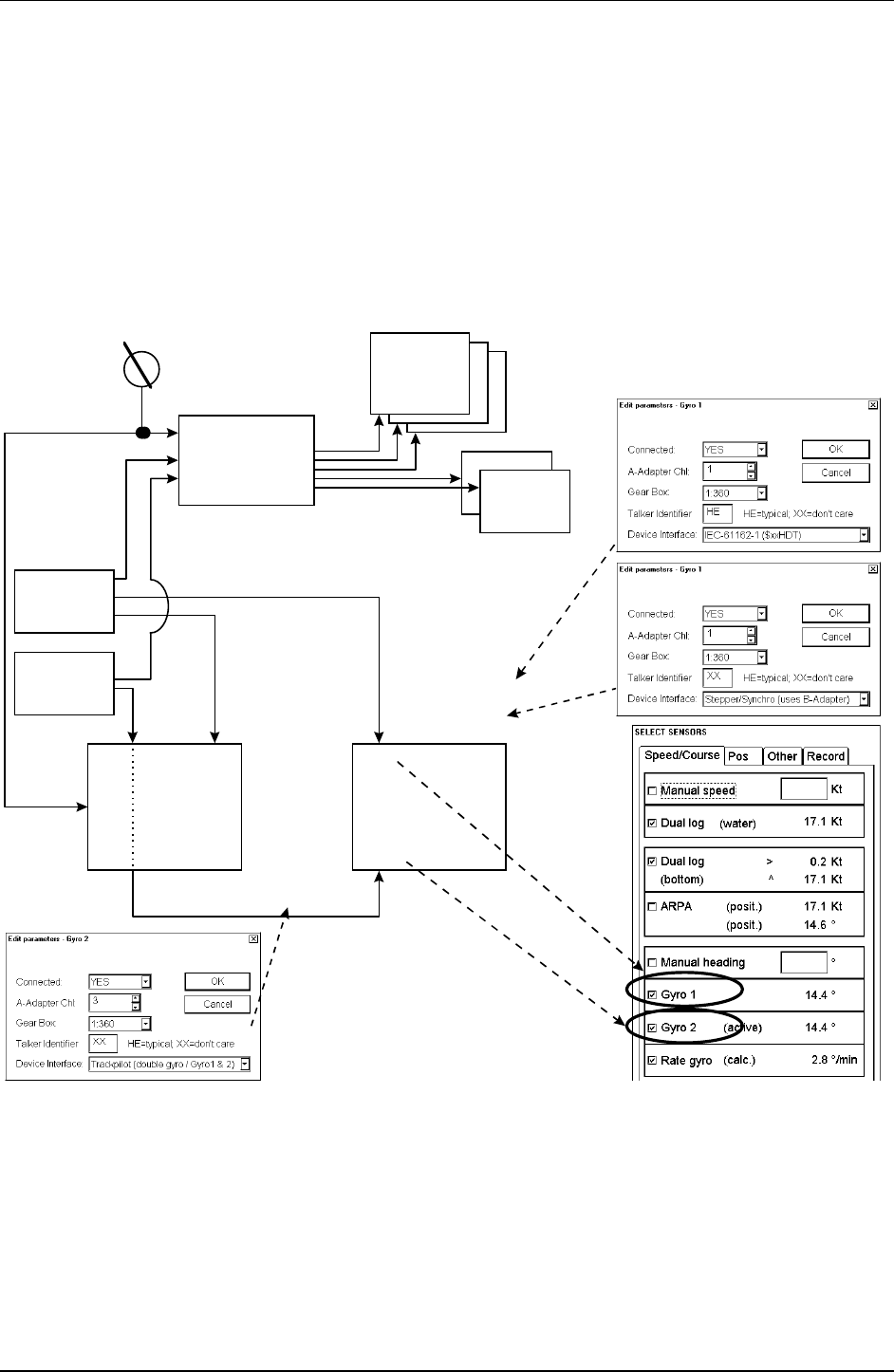
DNV NAUT-AW requires double gyro interface for Track Control System, which consists of ECDIS and trackpilot.
The benefit of this arrangement is that loss of a single gyro do not interrupt track control. The Track Control System
can smoothly continue with backup gyro.
Double gyro interface is build by connecting two Gyros (Gyro 1 and Gyro 2) directly to trackpilot. There is a
selection switch (First priority Gyro selector), which is used to select Heading source for Trackpilot, ECDIS and
common gyro distribution unit. In ECDIS there is on Sensor page text indication (active or backup) after Gyro 1 or
Gyro 2 to indicate state of "First priority Gyro Selector" switch.
System perform smooth transition (i.e. without unexpected large rudder movements) from one gyro source to another
gyro source. This smoothing is used both for user requested changes (i.e. user change position of "First priority
Gyro Selector") and for automatic changes (i.e. automatic continuation with backup source).
Gyro 1
Gyro 2
Track Pilot
ECDIS
First priority
Gyro selector
Gyro 2 through Trackpilot
IEC-61162-1 ($XxHDT)
or
Stepper/Synchro
Gyro 2 Gyro 1
Common
Distribution
Unit for Gyro
Gyro 2
Gyro 1
Selected gyro
(Gyro 1 or Gyro 2)
ARPA
ARPA
Gyro
Repeater
Gyro 1Gyro 2
Select
ARPA
ARPA
Gyro data distribution for Track Control System.
Indication of gyro source
On Information area
Possible indications on Upper right corner of ECDIS
· (1), indicates that heading used by ECDIS is from Gyro 1.
· (2), indicates that heading used by ECDIS is from Gyro 2.