



















Navigation Sensors · 337
If a selected DGPS sensor changes its operation mode and if user has used selection Primary or Secondary, then
the system generates alarm "4027 DGPS pos. source change" (4027 for first sensor, 4028 for second etc.). These
alarms are suppressed if user has used selection Pri no alarm or Sec no alarm
If source of position include a position sensor which is in Datum mismatch condition, then Latitude, Longitude and
selected Datum are indicated in red colour.
Primary and Secondary position of own ship
The system has three different positions for own ship: System position, Primary position and Secondary position:
· System position, which is used for navigation and steering. See chapter "Source of position" on page 336.
· Primary position, is the position of sensor which is selected as a primary position source.
· Secondary position, is the position of sensor which is selected as a secondary position source.
The source of Primary position of the own ship is position sensor, which has been selected either as Primary or as
Pri no alarm.
The source of Secondary position of the own ship are position sensors, which have been selected either as
Secondary or as Sec no alarm (see figure below). Secondary position of the own ship is not available as
latitude/longitude value for the user.
GPS in diff. mode
or SYLEDIS
selected as
SECONDARY
Any other than
GPS in diff. mode
or SYLEDIS
selected as
SECONDARY
Secondary
Position
of the
own ship
used by
the system
Selected and position exist
Secondary position
of the own ship
is not valid
Selected and
position exist
Not selected
or no position
Not selected
or no position
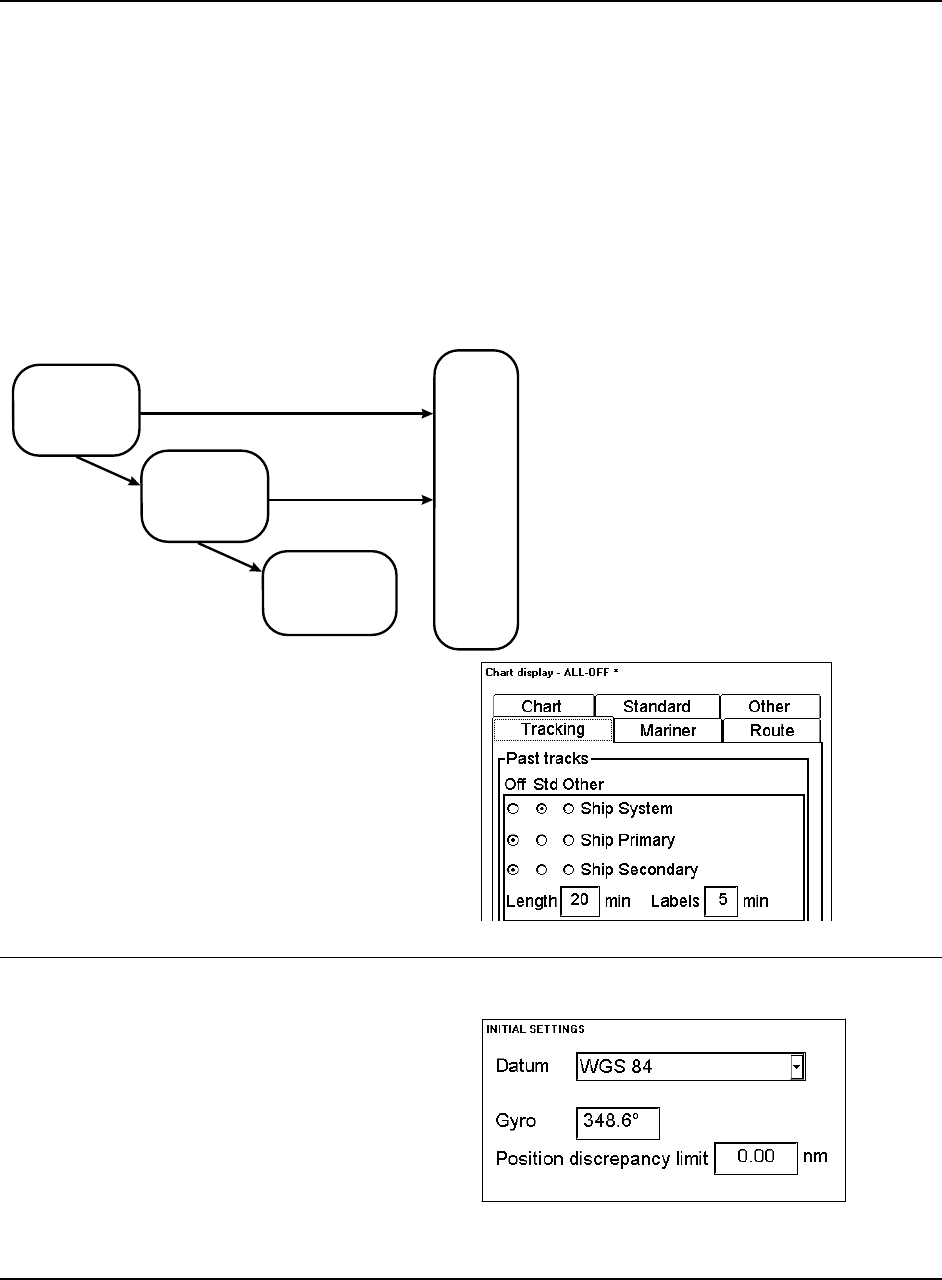
System, Primary and Secondary position of the own ship
are available as past tracks on ECDIS screen. You can
control their visibility from Tracking sheet of Chart
Details (see example below where "Ship System" has
been selected to be displayed).
Position discrepancy alarm
You can activate alarm "2007 Position discrepancy".
The alarm is active between Primary position and any
Secondary positions. Also the alarm is active between
the own ship position and any positions. To deactivate
alarm set limit as 0.00. You can set the limit for alarm
from Initial Settings.