



















338 · Navigation Sensors
Source of SOG, COG, speed, heading, rot, drift and
docking speed components
Use figures below to find source of various navigation data. "SOG, COG" is speed and course over ground.
"Speed" is speed over water, "Drift" is difference between speed over water and ground. Docking speed components
are: bow speed (transversal), stern speed (transversal) and center speed (longitudinal).
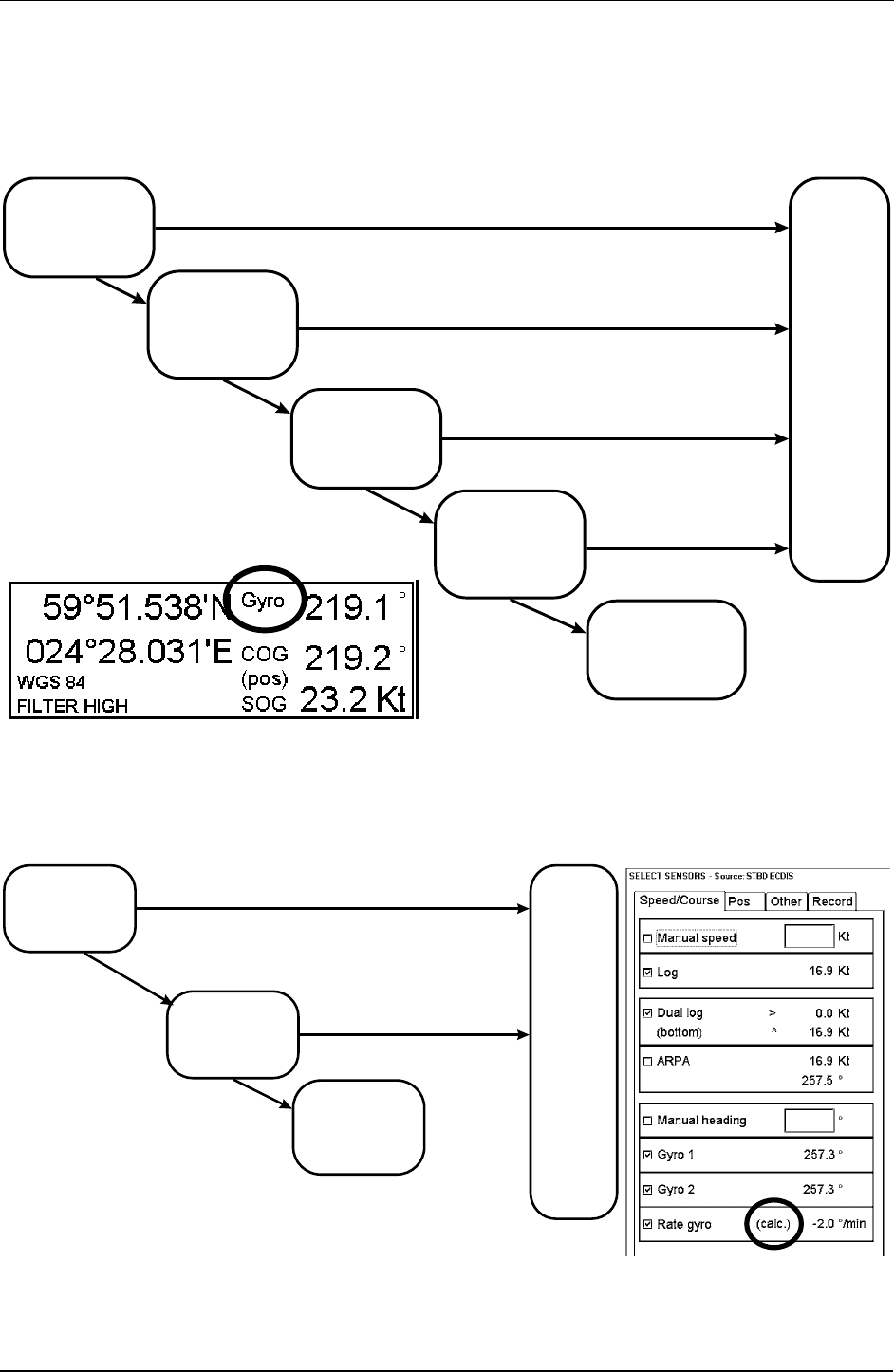
Manual
COURSE
GYRO 1
GYRO 2
GYRO from
RADAR
Alarm 2002
No Course
Available
Heading
used by
the system
Selected
Selected and value exist
Available
Selected and value exist
Not selected
Not selected
or no value
Not selected
or no value
Not available
Heading used by the System is shown in right hand upper corner of ECDIS display. In this case heading is received
from Gyro and it is shown without specific indication (see the example above). Following alternatives are available:
without specific indication, if value is referenced to true north; (mag) if value is referenced to magnetic north,
(man) if value is based on manual entry; (corr) if value includes gyro correction. Note that (corr) is displayed in
red colour. Exception for above is settings for "DNV NAUT-AW" where dual gyro interface is required. For
information of dual Gyro installation, see chapter "Double Gyro interface for DNV NAUT-AW" on page 341.
Calculated ROT
from movement of
Heading
ROT Gyro
Alarm 4018
ROT gyro error
R.O.T
used by
the system
Selected in Installation Parameters
Value exist
Not selected in Installation Parameters
No value
ROT used by the System is shown in SENSOR Speed/Course sheet. In Rate Gyro field, if there is a text (calc) the
system calculates ROT from movement of heading and, if there is no text value is received from ROT gyro.