



















342 · Navigation Sensors
· (cor1), indicates that heading used by ECDIS is from Gyro 1 and that gyro correction has been used
· (cor2), indicates that heading used by ECDIS is from Gyro 1 and that gyro correction has been used
· (mg1), indicates that heading used by ECDIS is from Gyro 1 which is a magnetic compass
· (mg2), indicates that heading used by ECDIS is from Gyro 1 which is a magnetic compass
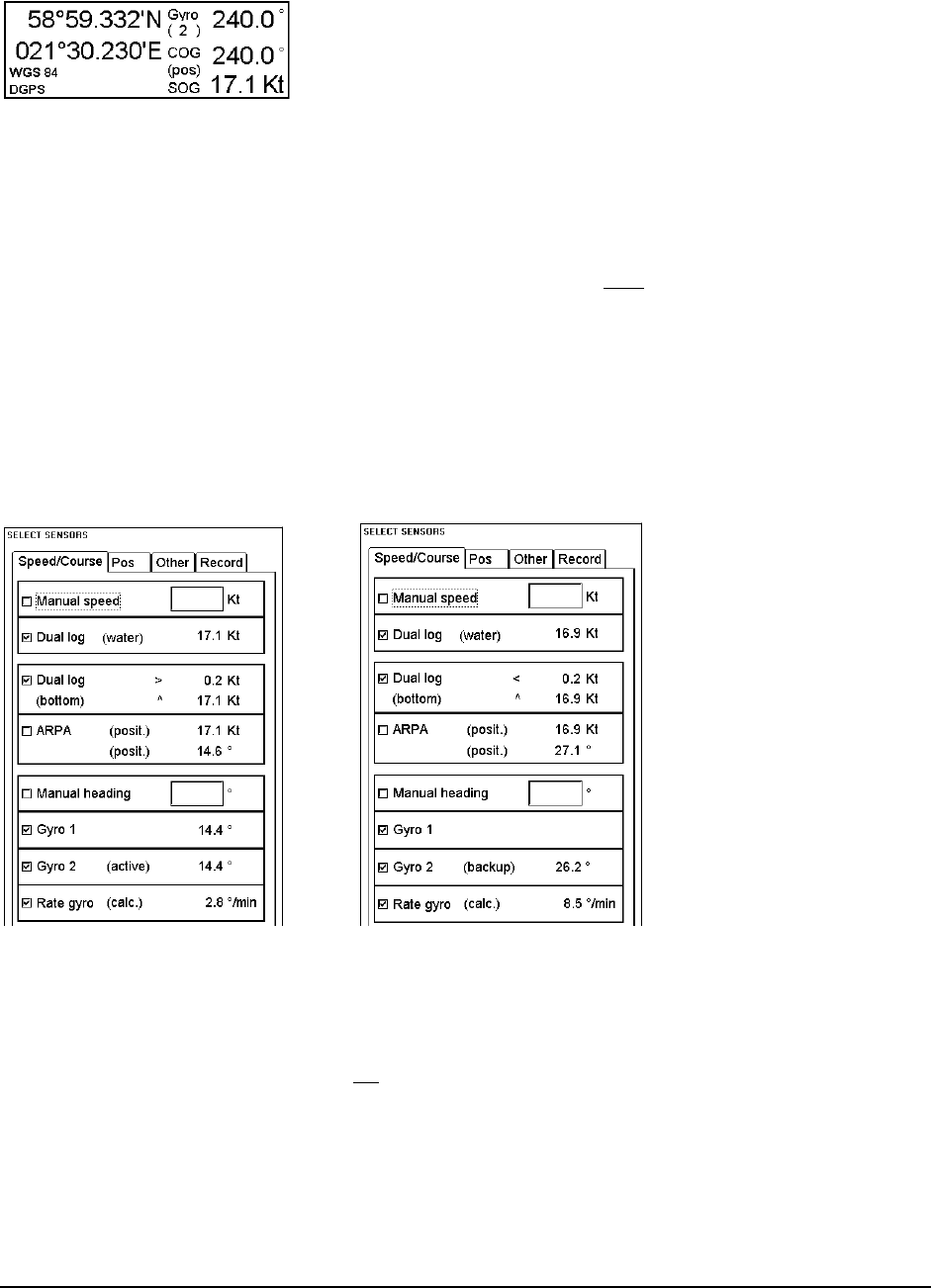
Above is an example where "First priority Gyro selection" switch is in state Gyro 2.
On Select Sensor window
Possible indications on Speed/Course page of Select Sensors:
· (active), indicates that system uses value from this Gyro which is selected by "First priority Gyro Selector"
· (backup), indicates that system uses value from this Gyro which is NOT selected by "First priority Gyro
Selector"
For more information of gyro selections, see examples below
In left hand side example, heading information from Gyro 2 is used by Trackpilot and ECDIS. Indication (active) in
Gyro 2 field on Speed/Course page of Select Sensors window indicates that system used gyro from user selected
source of heading (State of "First priority gyro selector" switch). In this case the indication on upper right corner
of ECDIS is shown as ( 2 ).
In right hand side example, heading value from Gyro 1 is lost. System selects automatically Gyro 2 to be used as a
source of heading. Indication (backup) in Gyro 2 field indicates that backup gyro is used.
Associated alarms
When no gyro value is received from gyro selected by First priority gyro selection, alarm AL 10 (Missing working
gyro) is generated on Trackpilot.
When no gyro value is received from gyro not selected by First priority gyro selection, alarm AL 11 (Reference
gyro missing or Compass comparison alarm) is generated on Trackpilot. Note that alarm AL 11 is activated also if
deviation between Gyro 1 and Gyro 2 is too big (default is 12º).
ECDIS generate alarm 4005 for missing Gyro 1 and alarm 4006 for missing Gyro 2. If deviation between gyro 1
and gyro 2 is over 5º, then ECDIS generate alarm 2004 Gyro data unreliable.