



















Navigation Sensors · 349
Gyro error correction
Typical gyro error sources are: installation offset, speed/latitude error and dynamic settling error. Typically you
detect gyro error on a User chart superimposed on the ARPA picture, on ARPA targets drawn on the ECDIS screen
or on radar overlay drawn on the ECDIS screen.
Gyro error correction is used to remove the difference between the Chart North and the Gyro North.
Gyro error can be corrected totally or partially already in the gyro compass system itself. Many gyro compass
systems have automatic speed/latitude corrector, which may use automatic or manual input for speed and latitude.
Some gyro compass systems include also correction for dynamic settling error.
Automatic Gyro error compensation based on the Reference targets can be used with all kind of Gyro compass
systems to remove any error left.
Automatic Gyro error correction based on tabled speed/latitude correction can be used, if the gyro compass itself
does not make any corresponding correction.
Gyro error compensation can be used to:
· correct User chart on ARPA Radar screen.
· correct ARPA target positions on ECDIS screen
· correct radar overlay drawn on ECDIS screen
· compensate courses used in Route Monitoring and automatic Route Steering.
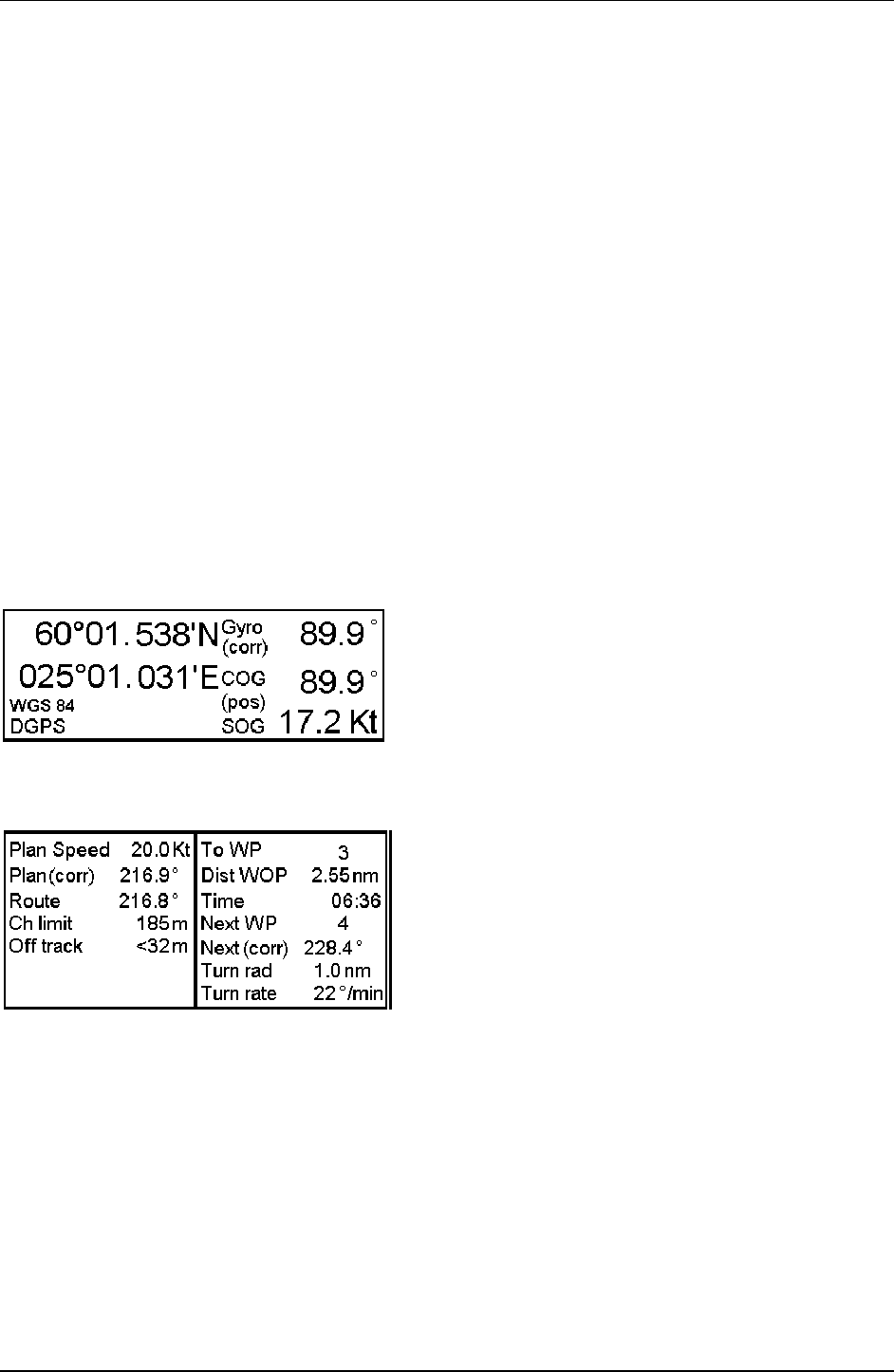
If you have enabled Gyro error correction and if this correction has modified the value of the own ship heading,
then this condition is always visible in Information Area (upper). See example below. Red coloured (corr) indicates
that the value of Gyro has been corrected.
If you have enabled both Gyro error correction from Ship Parameters and Gyro error compensation from Route
Parameters then Plan and Next in Information Area (upper) display compensated values (see below). Also course to
steer used by automatic Route Steering is compensated in this case.