



















58 · Set up before departure
Verify configuration of navigation sensors
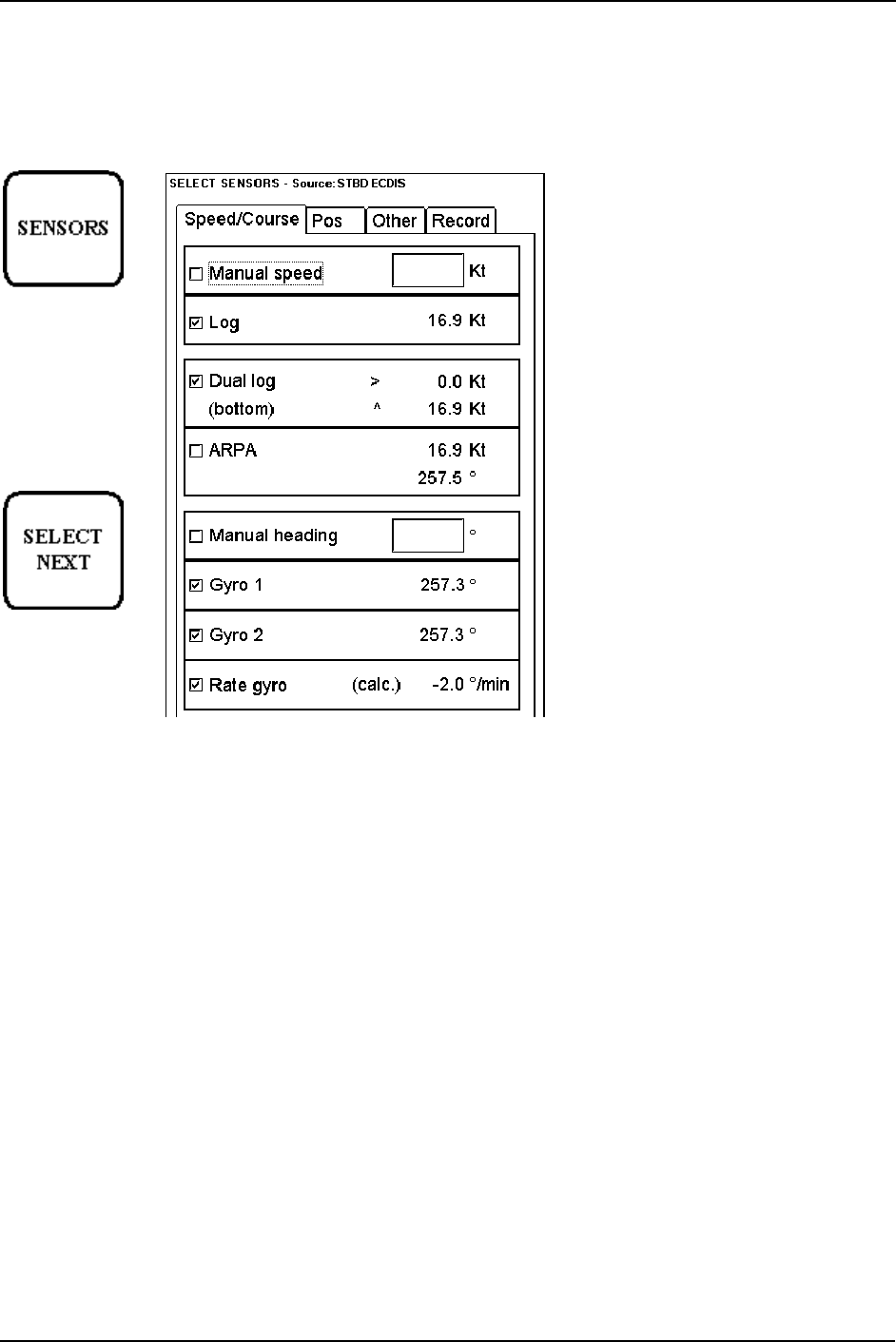
User can select navigation sensors used in navigation and view their current values.
Checkbox status shows whether to use the sensor for integrated navigation or not. If there is no value with sensor it
indicates that sensor is not valid. Note, that content of these sheets is depending on sensors which are in use on the
ship.
SENSORS
push button
To select
between
Speed/Course
and Position
sheets to be
opened either
press button
or go by
cursor above
Speed/Course
or Position text
and press
SELECT
Verify source of navigation sensors
In a multiple Workstation environment verify that Sensor source indicated Initial Setting is the intended one.
Verify SPEED settings
Select both LOG and DUAL LOG, if they are available. Or select one of them.
Note that MANUAL SPEED should be used in only emergency state when no other speed reference is available.
Remember that position sensors are also available as speed reference sources.
Verify RADAR settings
If LOG and DUAL LOG are not available, you can use radar as source for speed and course.
Verify GYRO settings
Select GYRO1 or GYRO2. Note that in typical installation GYRO1 is connected to a traditional gyro compass,
while GYRO2 receives gyro value from either Trackpilot or a DGPS sensor.
Note that MANUAL heading should be used in only emergency state when no other heading reference is available.
Rate gyro is always automatically selected.