



















Averaging is another way to improve accuracy. The improvement is
proportional to the square root of the number of averages. Two types of
averaging are supported: Sweep-by-sweep and point-by-point.
Point-by-point averaging works by collecting multiple measurements
while at each frequency point and then averaging them together.
Sweep-by-sweep averaging works by performing multiple complete
sweeps and averaging the individual the individual frequency points
by taking data from the different sweeps. The primary difference is the
amount of time between samples at a given frequency point (short for
point-by-point, longer for sweep-by-sweep).
Sweep-by-sweep averaging may produce lower trace noise because the
averaging time is more likely to exceed the coherence time of the noise
source. The disadvantage is that any slow drift or transient response
of the device under test will be lost in the averaging process.
Sweep-by-sweep is hence less suitable for use during device tuning.
Conversely, point-by-point averaging will better preserve device tuning
response or device drift. It may, however, result in slightly elevated
trace noise (relative to sweep-by-sweep) since the measurement time
may be less than the coherence time of the noise source.
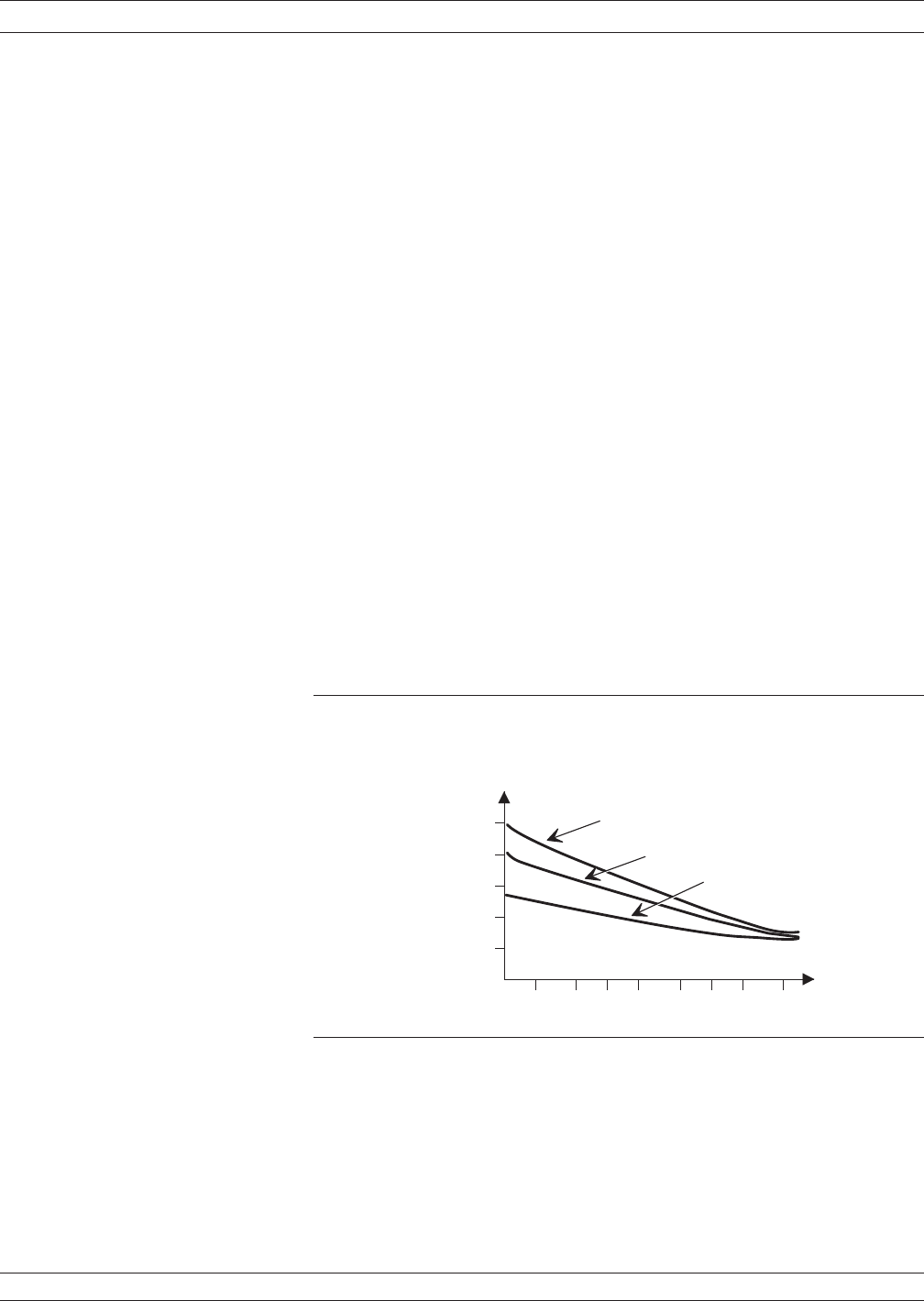
Figure 8-12 shows the measured reduction in noise due to bandwidth
and averaging.
Example: Using 1 kHz BW reduction and 10 averages, you would in
-
crease the signal-to-noise ratio by 7.6 dB but would lengthen the time
required for the measurement by a factor of 4.3. This example assumes
a constant signal power.
LOW LEVEL AND GAIN MEASUREMENTS
8-16 37xxxE OM
M E A S U R E M E N T S O N A 7 0 d B A T T E N U A T O R
A L L D A T A N O R M A L I Z E D T O
A 1 k H z I F B A N D W I D T H A N D 1 A V E R A G E
R E L A T I V E
N O I S E ( d B )
N U M B E R O F A V E R A G E S
7 . 0
3 . 5
1 . 4
. 3 5
. 1 4
1 2 5 1 0 2 0 5 0 1 0 0 2 0 0 5 0 0
1 0 K H z ( I F B W )
1 K H z
1 0 0 H z
. 7
Figure 8-12. Reduction in Noise Using Averaging